RealTime-Rendering12-AABB Plane intersection
AABB Plane intersection
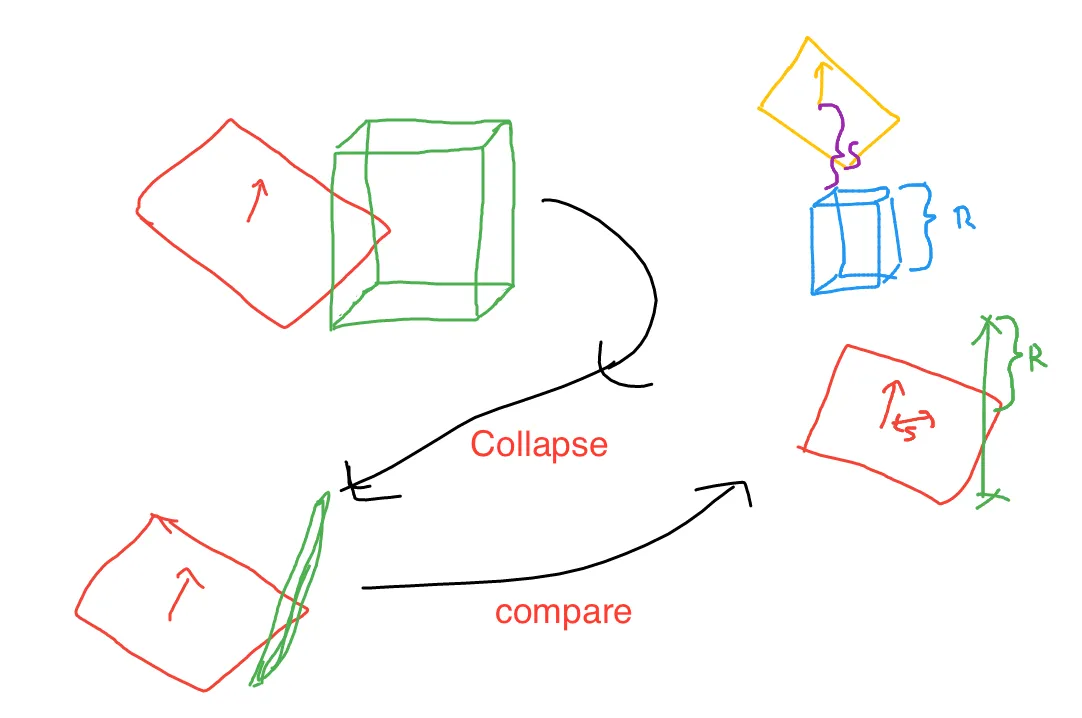
核心判定逻辑:计算AABB中心到平面的有符号距离(signed distance),并与AABB在平面法线方向上的投影半径(projection interval radius)进行比较。
平面由法向量n和到原点的距离d定义:
$x\cdot \vec{n} = d$
AABB由最小角点 min 和最大角点 max 定义,可以将其转换为中心-半边长(center-extents)表示:
中心点:$c = (min + max) / 2$
正半边长:$e = max - c$
投影半径计算:
AABB在平面法线n方向上的投影半径r为各轴向半边长在法线方向上的绝对值之和,这实际上是AABB在法线方向上的最大”半径”——从中心到最远顶点的投影距离,直观理解可以表示为AABB在法线方向投影的覆盖范围
$r = e_x|n_x| + e_y|n_y| + e_z|n_z|$
有符号距离计算:
计算AABB中心 c 到平面的有符号距离 s:
$s = \vec{n} \cdot c - d$
| 条件 | 结果 | 含义 |
|---|---|---|
| $\lvert s \lvert <= r$ | 相交 | AABB与平面相交或接触 |
| $s < -r$ | 完全在负侧 | AABB完全位于平面负半空间 |
| $s > r$ | 完全在正侧 | AABB完全位于平面正半空间 |
几何解释:投影半径$r$定义了一个区间$[-r, +r]$。如果中心到平面的距离$s$落在这个区间内,说明平面穿过AABB;否则AABB完全位于平面的一侧。
1 | // Test if AABB b intersects plane p |